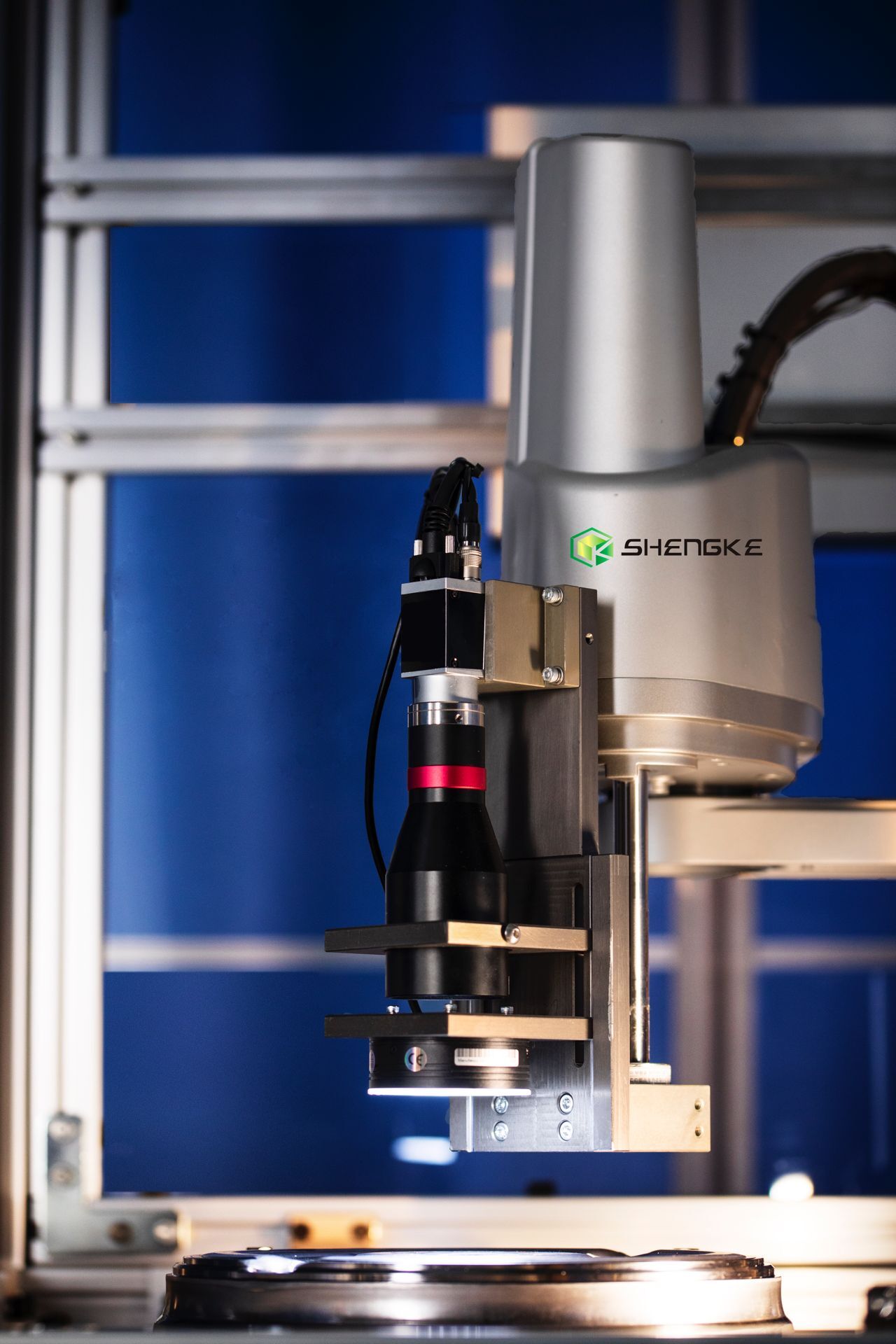
The traditional visual inspection system is based on the fixed visual sensor, which focuses on the measurement of the geometric size and spatial position of the object. However, due to its poor fixity and versatility, and the problem that it can not be applied to the precise measurement of a variety of large parts or the fast switching of small batch parts measurement, it can not meet the measurement requirements of multiple varieties and multiple series in the industry. Based on the on-line vision measurement method of mobile robot, a high-precision on-line vision detection system based on industrial robot is designed and developed, which can not only give full play to the characteristics of flexible robot movement and small floor area, but also solve the problem of poor universality of traditional vision detection system, especially suitable for non-contact, rapid and accurate measurement of large-scale special-shaped parts at any time The immediate program switch can meet the testing requirements of multiple varieties and series of products.
 中文
中文 ENGLISH
ENGLISH