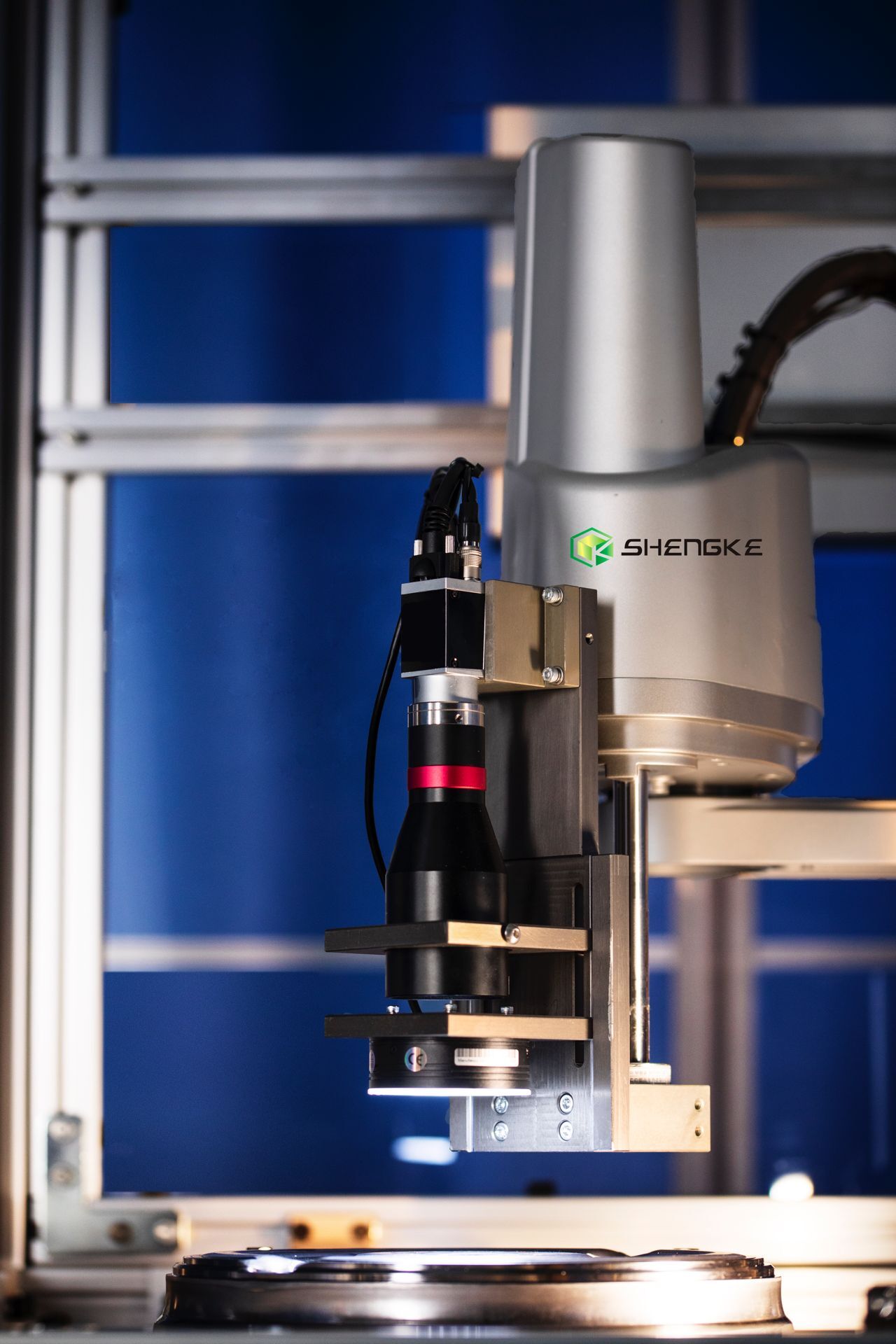
移动机器人视觉测量
传统的视觉检测系统建立在固定式视觉传感器基础之上,重点对物体的几何尺寸及空间位置测量,但由于其固定性、通用性差和无法适用于多种较大型零部件精确测量或小批量零件测量快速切换的问题,无法满足工业中多品种、多系列的测量需求。移动机器人视觉在线测量方法,设计和开发了一种基于工业机器人的高精度在线视觉检测系统,不仅能够充分发挥机器人运动灵活、占地面积小的特点,而且解决了传统视觉检测系统通用性差的问题,尤其适合在对大型异型零部件进行非接触、快速精确测量;随时变换程序即能够满足产品多品种、多系列的检测需求。
产品详细资料
预览详细资料
 中文
中文 ENGLISH
ENGLISH